嵌入式
C语言数组实例
产品经理
华为云
dxf
bert
注释
activity7
CRM
学生我那工业作业
VECTOR工具
ACK
原型模式
Scratch等级考试四级
antdb数据库
线程安全
与数值互转-拼接
企业上云
系统架构设计师
nlg-eval
机器人原理
2024/4/11 18:15:54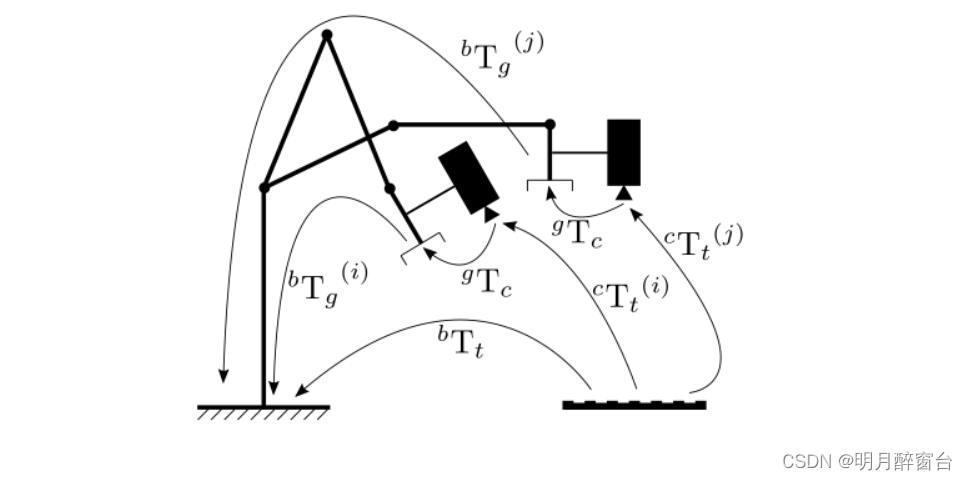
机器人控制算法九之 位姿描述与空间变换
机器人控制算法九之 位姿描述与空间变换 相关内容: 位姿空间变换欧拉角与RPY角… 一个简单的机器人场景中的坐标系展示:
1.刚体位姿描述
研究机器人操作臂的运动:涉及各连杆位姿关系、连杆与周围环境(操作对象和障碍物…